日研制两足奔跑机器人:时速4.2公里可后空翻!
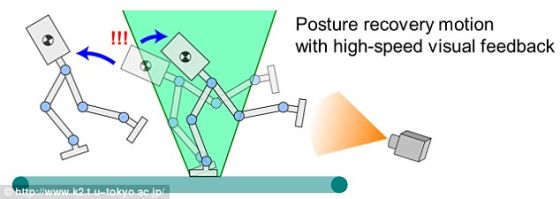
系统使用一台高速相机拍校正自身姿态,从而使机器人可以快速奔跑而不会摔倒。
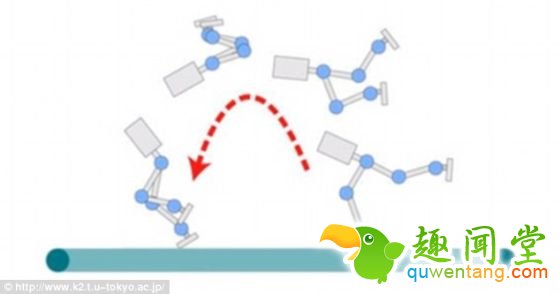
这项技术甚至让这台机器人可以在空中来一个后空翻。
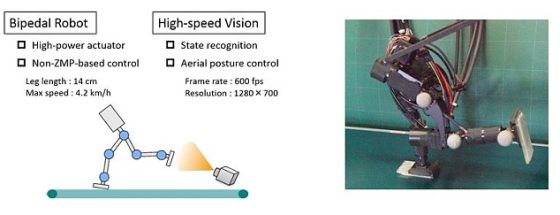
这款新型机器人采用了一台高速摄像机与一台稳定马达来达到稳定控制,从而实现身体的前倾与奔跑动作。
新浪科技讯 北京时间9月4日消息,据英国《每日邮报》报道,日本研究人员近日公布了一款小型的两足机器人,这是目前世界上行进速度最快的此类机器人之一。这款机器人名为“Achires”,即“活动协调高速图像处理奔跑实验系统”的缩写。它采用一台高速摄像机进行景物识别,可以实现向前俯身奔跑而不会摔倒。
这台机器人甚至还可以做后空翻,而设计团队则表示他们的最终目标是让它能够超越人类的表现。研制方日本东京大学的科研团队表示:“我们的目标是,通过不断改善硬件与控制系统性能,追求让机械系统拥有超越人类表现的能力。正是基于这样的目标,我们研制了这款全新的两足奔跑机器人系统。”
这款机器人设计是全新的。很多其他机器人的控制中汇借助一个名为“零运动点”的位置来确保身体的平衡,而这款新型机器人则采用了一台高速摄像机与一台稳定马达来达到稳定控制,从而实现身体的前倾与奔跑动作。这样一来,这条机器人便能以极富动感的姿态进行奔跑动作,它甚至可以完成翻筋斗的复杂动作。
目前这款机器人已经是世界上行动最为迅速的两足行走机器人之一了,其前进速度可以达到每小时约4.2公里。研究组表示:“运用高速图像反馈,我们意识到我们的研究路线中,高速奔跑应当被作为迈出的第一步。”这台机器人的腿长大约是14厘米,每秒可以迈出6步。
研究组表示:“我们在展示中还表演了后空翻的动作。”
除此之外,在奔跑的时候这台机器人同时还展示了跳跃动作。在高高跳起的同时,它的两条腿弯起来,身子在空中高速旋转。
今后这台机器人还将经历持续改进,不断提升其技能,同时展示各种适合两足机器人的任务挑战。尽管目前这台机器人还只能一次运行10秒左右,研制组正致力于延长它的运行时间。
这个研究组此前还研制过一个名为“janken”的机器人,它使用相机检测人类手部动作,并且可以在石头剪子布的游戏中轻松击败所有人类对手。
而研究组指出,这两台机器人全都采用了相同的原理。在硬件以及基于相机的识别系统方面技术的不断提升未来将可能帮助制造出速度更高的工厂装配线机器人或是其他可以超越人类速度的科技。
欢迎转载趣闻堂的文章,请注明出处:趣闻堂 (quwentang.com)
相关推荐

科学家:100年后机器人将会和人类生孩子
阅读(12)
-
明星要失业?日本开发出艺人仿真机器人
阅读(11)
-
别想歪了! 这只是一台弹跳机器人
阅读(10)
-
未来机器人将通过互联网来完成自我进化
阅读(6)
-
研制机器人牧羊犬 聚拢和放牧牲畜的机器
阅读(8)
-
能让你感觉背后有鬼的机器人
阅读(6)
-
中国餐饮机器人赴美国现场制作油焖大虾
阅读(10)
-
脑外科手术机器人:从脸颊进入大脑
阅读(7)







趣闻随便看

中国夫妻最缺什么?说得
阅读(9)
-
想生双胞胎也有技巧的?
阅读(10)
-
神奇!盘点地球上五种没
阅读(8)
-
生活中的7件小事让你错失
阅读(7)
-
还没适应手机砍掉3.5mm耳机
阅读(11)
-
摄影师和座头鲸趣味同游
阅读(10)
-
全球奇葩Top5:让鳄鱼咬一
阅读(4)
-
人类换头术能否成功?这
阅读(9)
-
洗手很费水,换用空气洗
阅读(1)
-
虐死单身汉“春天到了,
阅读(7)









7天热门
-
童话变真实?沉睡500年的
阅读(178)
-
四大超时空悬案
阅读(155)
-
不可思议的“神秘地带”
阅读(78)



特别推荐
-
UFO再次靠近国际空间站,
阅读(8)
-
震惊科学界!阿根廷惊现
阅读(4)
-
15个让你大开眼界的水果切
阅读(6)
-
惊讶!17岁少年心跳停了
阅读(10)
-
万圣节装扮最大赢家是孕
阅读(1)
-
比百慕大更真实的存在!
阅读(4)
-
牙医帮你纠正7个错误刷牙
阅读(4)
-
当科技和舞蹈结合在一起
阅读(2)
-
9个改变自己的细节
阅读(7)
-
脱口秀主持人台上被殴打
阅读(6)
-
他醉酒照被传到网上后,
阅读(15)
-
这女子每年花费1.15万英镑
阅读(10)